An injection molding cell making automotive connectors runs 4-second cycles: mold closes, inject, cool, mold opens, robot enters, extracts parts, mold closes. The robot has 1.2 seconds to enter the mold area, grip 16 parts, and clear the mold before the next close. If the robot is 50 milliseconds late, the IMM waits — and 50 milliseconds per cycle across 720,000 cycles per year costs 10 hours of lost production. In an integrated control architecture, the IMM and robot share a single clock and a single recipe database. In a standalone architecture, they negotiate every handshake over a fieldbus. The 50 milliseconds is the difference.
What "Integrated" Actually Means
IMM-integrated robot control means the robot's servo drives, safety logic, and motion planner run inside the IMM's control system — often on a shared backplane or a dedicated processor card plugged into the IMM's main rack. The operator sees one HMI. One program contains both the molding sequence and the robot sequence, with shared variables: mold position, ejector position, robot-in-mold signal, safety-zone status. When the operator loads a mold recipe, the robot program for that mold loads automatically from the same database.
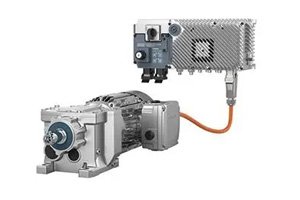
The KraussMaffei IR Series 6-axis robot exemplifies this architecture: the robot is mechanically a standard 6-axis arm (8–210 kg payload range), but its controller is a card inside the KraussMaffei MC6 IMM control system. Programming is done on the IMM's touchscreen, not a separate teach pendant. For high-cavity fast-cycle molding — packaging, medical disposables, electrical connectors — this integration is the difference between 4.0-second and 4.2-second average cycle time, compounded over millions of cycles.
What Standalone Control Buys
A standalone robot controller — like the ABB IRC5 — runs the robot independently of the IMM. The IMM sends an "open complete" signal via a hardwired interlock or fieldbus. The robot enters, extracts, and sends "robot clear" back to the IMM. Each handshake costs 15–50 milliseconds depending on the communication protocol and the IMM's scan cycle time.
The upside is flexibility. A standalone robot can perform operations the IMM controller was never designed to coordinate: vision inspection of every part before placing it on a conveyor, laser marking, in-mold labeling with registration verification, multi-stage assembly (insert loading plus part extraction plus degating plus packaging). A standalone robot controller has the I/O count, the vision interface, and the programming environment to handle these sequences. An IMM-integrated robot is optimized for one primary job: get parts out of the mold fast. Adding vision-guided assembly to an integrated robot often means adding a separate PLC — at which point the integration advantage is diluted.
Mold Change: The Integration Advantage
When a mold changes, two things must happen: the IMM loads new process parameters (barrel temperatures, injection speed profile, holding pressure, cooling time), and the robot loads a new extraction program (entry path, grip pattern, exit timing, placement position). In an integrated system, one recipe file contains both. The operator selects the mold, and the robot program follows automatically — no separate download, no version mismatch between IMM recipe version 7 and robot program version 12.
In a standalone system, the IMM recipe and robot program are managed separately. An operator changing a mold must load the IMM recipe on the IMM HMI and the robot program on the robot teach pendant. If either is the wrong version — the mold was modified to add a new ejector pin sequence but the robot program still expects the old timing — the result is a collision or a dropped part. Mold change errors are the leading cause of robot-IMM crashes in standalone architectures. Integrated control eliminates this failure mode entirely.
- Integrated mold change time
- Recipe selection + robot program = one step, under 30 seconds. Zero version-mismatch risk.
- Standalone mold change time
- Two separate loads, 90–180 seconds total, plus verification. Requires disciplined revision control between two systems.
- When it matters
- Shops running 3+ mold changes per shift. At one mold change per week, the standalone overhead is negligible.
Post-Mold Operations: Where Integration Ends
Modern injection molding cells increasingly combine multiple downstream steps after part extraction: degating (cutting the runner from the part), vision inspection, pad printing or laser marking, assembly (inserting a metal contact into a plastic housing), and packaging into trays or bags. An IMM-integrated robot controller lacks the I/O channels, vision-processing interface, and multi-station programming logic for these workflows.
The practical dividing line: if your robot only extracts parts and drops them on a conveyor, integrated control is faster and simpler. If your robot does anything else — inspection, marking, assembly, sorting by cavity number, selective packaging — standalone control gives you the headroom to add those steps without bolting on a separate automation PLC. Browse modular PLCs for the case where you need to coordinate robot motion with complex post-mold automation that neither the IMM nor the robot controller handles natively.
Can I retrofit integrated robot control to an existing IMM and standalone robot?
Rarely. Integrated robot control requires the IMM manufacturer to support the specific robot brand and model as a plug-in option. This is a hardware-level integration — a dedicated drive card, a backplane slot, and firmware support in the IMM controller. Retrofitting from standalone to integrated typically means replacing both the robot and the IMM controller, or buying a new IMM-robot package. The more practical upgrade path for an existing standalone cell is to improve the fieldbus handshake: upgrading from hardwired interlocks to PROFINET IRT or EtherCAT can cut handshake latency from 50 ms to under 5 ms, recovering most of the cycle-time gap without replacing hardware. The servo drive response time on both the IMM's ejector axis and the robot's entry axis must also be tuned to support the faster handshake.
If your cell runs 2 million cycles per year, 50 ms of saved handshake time equals 27.8 hours of recovered production — roughly 1.2 full days of additional output from the same machine. At a machine-hour rate of $150, that is $4,170 of annual margin from a control architecture decision.
How do I decide between integrated and standalone for a new cell purchase?
Answer three questions. First: how many mold changes per shift? Above three, integrated saves real money in changeover labor and error prevention. Second: does the robot only extract and drop, or does it also inspect, mark, assemble, or sort? For extraction-only, integrated wins. For multi-step post-mold work, standalone wins. Third: will you add a second robot to the same IMM for insert loading, or add downstream automation stations? If yes, standalone gives you the architecture headroom. If the cell will always be one IMM, one robot, one conveyor — integrated is the higher-throughput, lower-complexity choice.